
Search the Site with

|
Search the Site with
|

Description:
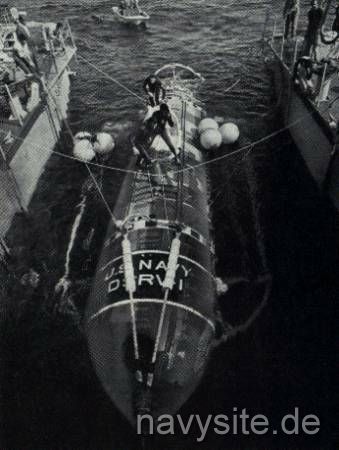
Deep Submergence Rescue Vehicles perform rescue operations on submerged, disabled submarines of the U.S. Navy or foreign navies.
 History:
History:
DSRV’s were developed as a result of the sinking of the USS THRESHER (SSN 593) in April 1963 (the 13th submarine of the Navy lost in peacetime), when all hands (129 men) were lost. After the accident of USS THRESHER the Navy founded the Deep Submergence Systems Review Group (DSSRG). This group found out that the Navy had no possibility to rescue sailors located deeper than 330 meters below the water as this was the maximum range of the McCann - rescue bell. This bell was first used in 1933 when 33 sailors were rescued out of the submarine USS SQUALUS in a depth of 73 meters. The group also found out that the Navy had only primitive means to locate sunken objects and that the salvage of those objects would almost be impossible.
In 1964, the project of the DSSRG became an own part of the Navy's Ocean Engineering Program and was named Deep Submergence Systems Project (DSSP). The main task was to create a rescue vehicle for the crews of submarines.
The Deep Submergence Systems Project contracted with Lockheed Missiles and Space, Co. to construct a deep diving rescue submarine. In the beginning it was planned to built twelve of those vehicles, but from 1966 on, the costs went up and when the Navy realized that such a vehicle would be able to rescue 24 and not only 16 people, six vehicles were cancelled.
The DSSP demanded that a DSRV had to be able to reach every point in the world within 24 hours. That's why the Lockheed design engineers had to be careful with the weight of the DSRVs because they had to be transportable by truck, aircraft, ship, or by specially configured attack submarines. That was not an easy task and so Lockheed did not lacquer the hull and 21,5 pounds of weight were saved for example.
In 1968, the next accident of an SSN occurred when USS SCORPION (SSN 589) sunk during an exercise and all hands were killed. The Navy realized that the DSRVs would only be useful if the damaged submarine does not sink and will not be destroyed by the pressure of the water. But 77% of the oceans are too deep and so the Navy decided to purchase only two DSRVs.
In January 1970 the first of the two DSRVs was launched in Sunnyvale, Calif. The first diving tests of DSRV 1 were conducted in summer of 1970 by Commander P. Raetzman and Pilot R. Ross.
In early 1971, DSRV 1 was involved in rescue exercises for the first time and later DSRV 1 conducted exercises with USS HAWKBILL (SSN 666). After the successful conclusion of the test the DSRV 1 was officially delivered to the Navy.
DSRV 2 was launched in May 1971.
In 1977, both vehicles which previously had been nameless, got their names: DSRV 1 was named MYSTIC and DSRV 2 got the name AVALON.
Features:
DSRV’s are designed for quick deployment in the event of a submarine accident. DSRVs are transportable by truck, aircraft, ship, or by specially configured attack submarine. At the accident site, the DSRV works with either a "mother" ship or "mother" submarine. The DSRV dives, conducts a sonar search, and attaches to the disabled submarine’s hatch. DSRVs can embark up to 24 personnel for transfer to the "mother" vessel.


| General Characteristics - DSRV class | |
|---|---|
| Builder: | Lockheed Missiles and Space, Co., Sunnyvale, Calif. |
| Power Plant: | Electric motors, silver/zinc batteries, one shaft, 15 shaft horsepower, four thrusters, 7.5 horsepower, 28 VDC emergency battery. |
| Length: | 49 feet (15 meters) |
| Beam: | 8 feet (2.4 meters) |
| Displacement: | 38 tons (38.61 metric tons) |
| Speed: | 4 kts |
| Maximum depth: | 5,000 feet (1524 meters) |
| Navigation: | Based around the DSRV inertial reference unit (IRU). The electronic navigation system can be operated as a transponder, a doppler, an effector, and an integrated navigation system. The nav system utilizes the following sonars: - Doppler: 300 khz, max. range for bottom locks is 600 feet - Pulsed reply: 7-17 khz, range is 4,000 yds |
| Sonar: | - Deep Submergence Obstical Avoidance Sonar (DSOAS): 27 khz, range is 8,000 yds - Downward Looking Sonar (DLS): 500 khz sonar hatch mating 600 feet range - Altitude/Depth Sonar (A/D): 24 khz sonar 0-5,000 feet - UQC, 8 khz, voice and cw, (ATM 504) - directional listening hydrophone: tuned to 3.5 khz - side looking sonar (installed for alternate mission), 1 foot resolution, 183 khz, max range: 1200 feet either side (2400 feet total) |
| Camera: | - 35mm still camera - 5 b/w video cameras, 2 topside/2 bottom, 1 skirt - 1 color video camera in bow |
| Manipulators: | One arm designated to clear hatches of disabled submarines. Gripper and cable cutter combined. Able to lift 1000 lbs. |
| Data Logging: | Video/Audio/OAS recording on beta tapes, nav data on data cartridges |
| Ships: | Mystic (DSRV 1) Avalon (DSRV 2) |
| Crew: | Two pilots, two rescue personnel and the capacity for 24 passengers |